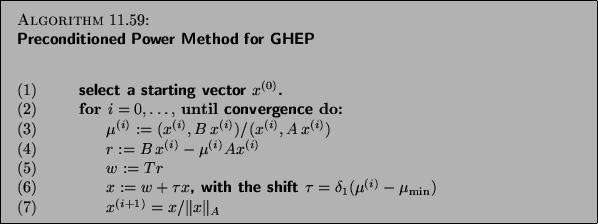
We present the single-vector version of the method
for the pencil ![]() in Algorithm 11.5.
On the output,
in Algorithm 11.5.
On the output,
![]() and
and ![]() approximate
the largest eigenvalue
approximate
the largest eigenvalue ![]() and
its corresponding eigenvector.
and
its corresponding eigenvector.
We note that the shift ![]() requires knowledge of
requires knowledge of ![]() , or its estimate from below.
If
, or its estimate from below.
If ![]() is nonnegative definite, then
is nonnegative definite, then
![]() may simply be replaced with
may simply be replaced with ![]() .
.
The standard arguments, based on the eigendecomposition of
![]() for the pencil
for the pencil ![]() , do not allow us to
show that the power method converges, as eigenvectors
in the eigendecomposition are not necessarily eigenvectors
of the iteration operator. This makes convergence theory
quite tricky. D'yakonov and his colleagues [150,146,147]
obtained explicit estimates of linear convergence for
iterative Algorithm 11.5
using assumption (11.9).
Somewhat simplified (see [264,265,268]),
the convergence rate estimate
for Algorithm 11.5
can be written as
, do not allow us to
show that the power method converges, as eigenvectors
in the eigendecomposition are not necessarily eigenvectors
of the iteration operator. This makes convergence theory
quite tricky. D'yakonov and his colleagues [150,146,147]
obtained explicit estimates of linear convergence for
iterative Algorithm 11.5
using assumption (11.9).
Somewhat simplified (see [264,265,268]),
the convergence rate estimate
for Algorithm 11.5
can be written as
The estimate shows that the convergence is (at least)
linear. Note that condition numbers of ![]() and
and
![]() do not appear in the estimate.
do not appear in the estimate.
Similar results can be obtained if
![]() for some
for some ![]() holds [147].
holds [147].
In numerical experiments, Algorithm 11.5
usually converges to
![]() for a random initial guess. When
for a random initial guess. When
![]() ,
the sequence
,
the sequence ![]() needs to pass
needs to pass ![]() eigenvectors, which are
saddle points of the Rayleigh quotient, to reach
eigenvectors, which are
saddle points of the Rayleigh quotient, to reach
![]() . The convergence may slow down, in principle,
near every saddle point.
For a general preconditioner
. The convergence may slow down, in principle,
near every saddle point.
For a general preconditioner ![]() , it is hard
to predict whether this can happen for a given initial guess
, it is hard
to predict whether this can happen for a given initial guess ![]() .
.
We have collected the dominant costs per iteration for Algorithm 11.5 in terms of storage and floating point operations respectively, in the following two tables.
| Item | Storage |
| Residual | |
| Approximate eigenvector | |
| Temporary vectors | 1-2 |
| Action | Major cost |
| Rayleigh quotient |
|
| Residual |
|
| Preconditioned residual |
Depends on preconditioner |
| Approximate eigenvector |
The main advantage of the preconditioned shifted power method is, of course, its algorithmic simplicity and the low costs per iteration. Using an a priori chosen shift provides the total control of the iterative method. The method is very stable and robust. A solid convergence theory exists.
The need of bounds for ![]() and
and
![]() to calculate the shift is a clear disadvantage.
Also, other preconditioned
eigensolvers we consider below converge linearly as well, but
typically with a better rate.
to calculate the shift is a clear disadvantage.
Also, other preconditioned
eigensolvers we consider below converge linearly as well, but
typically with a better rate.